
HuaXi Humanoid Robot H1
华西人形机器人H1
The HuaXi humanoid robot H1 has a human-like appearance and capabilities, enabling them to perform tasks such as perception, decision-making, action, and interaction. Empowered by large AI models, they are similar to humans in appearance and behavior, and have powerful intelligence. They can provide companionship, communication, and care support in scenarios such as homes and medical care, with a wide range of application prospects.
华西人形机器人H1具有类人外观和能力,能完成感知、决策、行为和交互等任务。通过AI大模型的赋能,它们在外形和行为上与人类相似,并拥有强大智能。在家庭和医疗等场景中可提供陪伴沟通和照护支持,应用前景十分广泛。


Soft Ankle Exosuit
柔性踝关节外骨骼
The Soft Ankle Exosuit is a flexible device that transmits assistive forces through Bowden cables. It generates personalized assistive control strategies by intelligently sensing the wearer's movement intentions and the human-machine state. This device can reduce the wearer's walking energy consumption and improve gait, making it suitable for healthy individuals, the elderly and patients with conditions such as sarcopenia, foot drop and so on.
柔性踝关节外骨骼是一种通过鲍登线来传递辅助力的柔性设备。它通过智能感知穿戴者的运动意图和人机状态,生成个性化的辅助控制策略。该设备能够降低穿戴者的行走能耗,改善步态,适用于健康人群、老年人和患有肌少症和足下垂等疾病的患者。

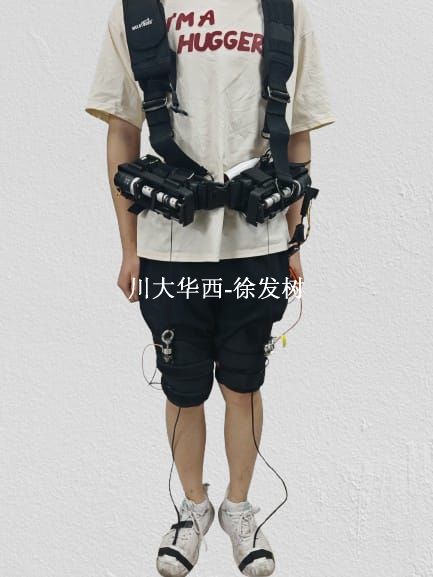
Soft Hip Exosuit
柔性髋关节外骨骼
The Soft Hip Exosuit is a flexible device that transmits assistive forces through Bowden cables. It generates personalized assistive control strategies by intelligently sensing the wearer's movement intentions and the human-machine state. This device can reduce the wearer's walking energy consumption and improve gait, making it suitable for the aged, Parkinson's disease, healthy individuals and so on.
柔性踝关节外骨骼是一种通过鲍登线来传递辅助力的柔性设备。它通过智能感知穿戴者的运动意图和人机状态,生成个性化的辅助控制策略。该设备能够降低穿戴者的行走能耗,改善步态,适用于老年人、帕金森患者和健康人群等。

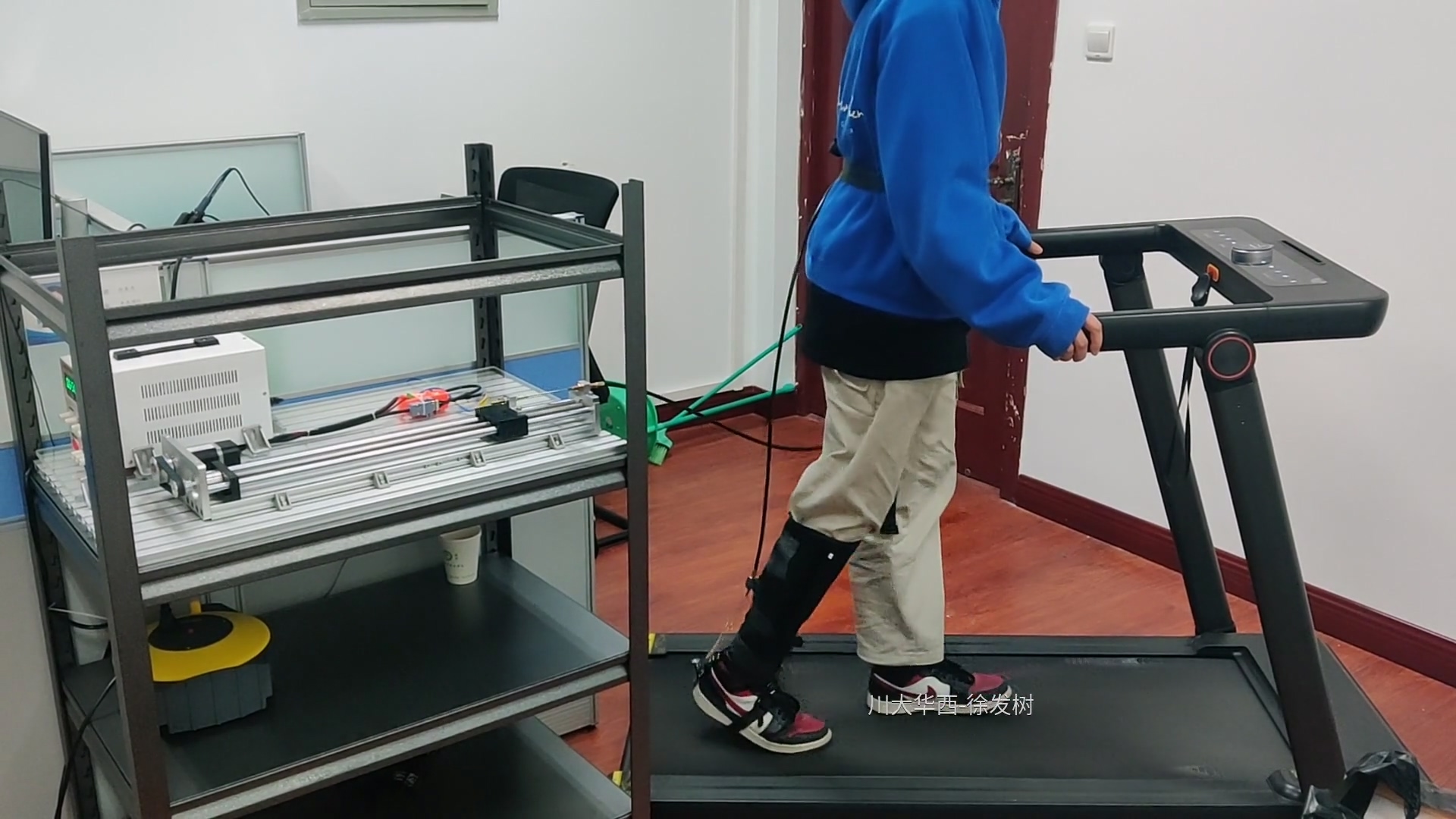
Passive Soft Ankle Exosuit
被动柔性踝关节外骨骼
The Passive Soft Ankle Exosuit can provide assistance to the human body during walking through mechanical devices without relying on active driving components such as motors, reducing metabolic energy consumption during walking, making walking easier and more efficient. At the same time, it can change the dynamic characteristics of the joints and the biomechanical characteristics of the main muscles of the lower limbs, helping to improve gait. It is suitable for outdoor walking and lower limb rehabilitation and other occasions, significantly reducing the wearer's energy consumption and improving walking ability and comfort.
被动柔性踝关节外骨骼可以不依赖电机等主动驱动元件,通过机械装置在行走过程中为人体提供助力,减少步行时的代谢能耗,使行走更加轻松和高效。同时,它能够改变关节的动力学特性及下肢主要肌肉的生物力学特性,帮助改善步态,适用于户外行走和下肢康复等多种场合,显著减少穿戴者的能量消耗,提高行走能力和舒适度。


Portable Knee Isokinetic System
可移动膝关节等速系统
The portable knee isokinetic system is a medical device specifically designed for knee rehabilitation training and muscle function assessment. It is based on dynamic isokinetic technology (constant movement speed combined with adaptive resistance adjustment), which precisely controls knee flexion and extension training and optimizes training effectiveness through real-time strength monitoring. Users could adjust the joint range and speed of training according to their needs, enabling personalized rehabilitation. It is suitable for clinical scenarios such as pre- and post-operative training for total knee arthroplasty (TKA), sports injury recovery, and muscle function strengthening.
可移动膝关节等速系统是一种专为膝关节康复训练及肌肉功能评估设计的医疗设备。它基于动态等速技术(恒定运动速度结合自适应阻力调节),精准控制膝关节屈伸训练,并通过实时力量监测优化训练效果。用户可根据需求调整训练角度与速度,进行个性化康复方案制定与评估,适用于全膝关节置换术的术前术后训练、运动损伤恢复及肌肉功能强化等应用场景。


Passive Finger Rehabilitation Robot
无源手指康复机器人
This innovative rehabilitation system addresses finger mobility impairments in paraplegic patients by harnessing residual elbow movement. Through a biomechanical translation mechanism, voluntary elbow motion is converted into targeted finger exercises, progressively restoring digital dexterity while strengthening musculotendinous structures. The regimen concurrently improves neuromuscular synchronization through repetitive task-specific training, facilitating adaptive neuroplasticity for functional recovery.
本设备是一套创新的康复辅助系统,专为截瘫患者因手部活动能力不足导致的手指活动受限或退化设计。通过利用患者保留自主运动功能的手肘部位,设备将手肘运动转化为手指的康复动作,帮助患者逐步恢复手指的灵活性和力量,同时增强神经肌肉的协调性。
-2023-11-tuya.jpg)
-2023-11-23-tuya.jpg)
Prosthetic Dexterous Hand
假肢灵巧手
The prosthetic dexterous hand is a biomimetic intelligent device developed for individuals with hand amputations or functional impairments. By synergistically combining sensor technology, artificial intelligence, and biomechanical engineering, it replicates natural hand movements and dexterity. Its key innovations include precise interpretation of neuromuscular signals to coordinate multi-joint actuation, enabling refined motions like precision grips, rotational movements, and object manipulation. This technology empowers users to regain essential daily living skills while fostering psychological recovery through restored social interaction capabilities.
假肢灵巧手是一款高仿生智能假肢设备,专为手部功能障碍或截肢患者设计,通过融合传感器技术、人工智能与机械仿生学,还原接近真实人手的功能性与灵活性。其核心功能为精准捕捉用户肌肉电信号或神经指令,驱动多关节协同运作,支持抓握、捏取、旋转等精细动作,助力患者重获日常生活自理能力与社交信心。
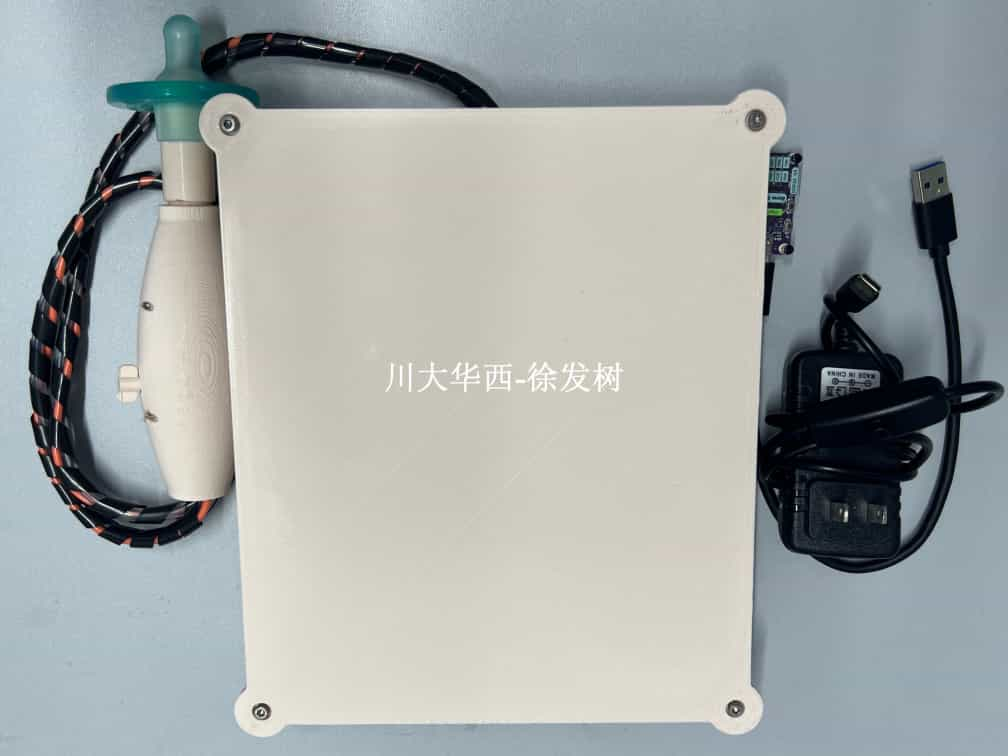
Neonatal Suction Training and Evaluation System
新生儿吸吮训练与评估系统
The Neonatal Suction Training and Evaluation System is a assistance device specifically designed for newborns and preterm infants, primarily aimed at assessing and improving infants' sucking abilities. Equipped with high-precision sensors, the device records suction strength, frequency, and patterns, visualizes the data in real-time, and conducts evaluations and analyses to determine whether infants experience sucking difficulties. Based on the assessment results, it generates personalized training programs, including parameters such as suction strength, frequency, and rhythm, to enhance newborns' sucking skills and help them better adapt to breastfeeding.
With the newborn sucking training and evaluation system, we can scientifically and effectively assess and train the sucking ability of newborns and premature infants, aiming to reduce the risk of infant malnutrition and improve their quality of life.
新生儿吸吮训练与评估系统是一款专为新生儿和早产儿设计的医疗辅助设备,主要用于评估和提高婴儿的吸吮能力。该设备可通过高精度传感器记录婴儿吸吮力度、频率和规律,将数据实时可视化,并进行评估和分析,以判断婴儿是否存在吸吮困难。同时可根据评估结果,生成个性化的训练方案,包括吸吮力度、频率、节奏等多变量参数,提高新生儿的吸吮技巧,帮助他们更好地适应母乳喂养。
借助新生儿吸吮训练与评估系统,我们能够对新生儿和早产儿的吸吮能力进行科学、有效的评测和训练,旨在降低婴儿营养不良的风险,提高他们的生活质量。

Acoustic Evaluation System for Knee Osteoarthritis
膝骨关节炎声学评估系统
The Acoustic Evaluation System for Knee Osteoarthritis collects acoustic signals from specific positions of the knee joint during movement through acoustic signal acquisition devices, combined with artificial intelligence algorithms to assess the wearer's Kellgren-Lawrence (KL) grading of the knee joint. This system enables non-invasive, radiation-free, and painless wearing and evaluation, providing a strong reference for early analysis of knee joint health conditions.
膝骨关节炎声学评估系统通过声学信号采集设备收集运动过程中膝关节特定位置的声学信号,结合人工智能算法评估穿戴者膝关节Kellgren-Lawrence (KL) 分级。该系统可实现无侵入、无辐射、无疼痛地完成穿戴和评估,可为膝关节健康状况的早期分析提供了有力参考。

